Haryt


4020 Robot goluny iki taraplaýyn ýüklemek we düşürmek
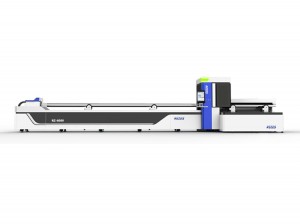
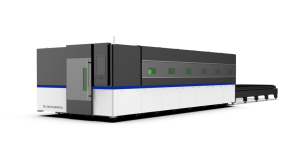
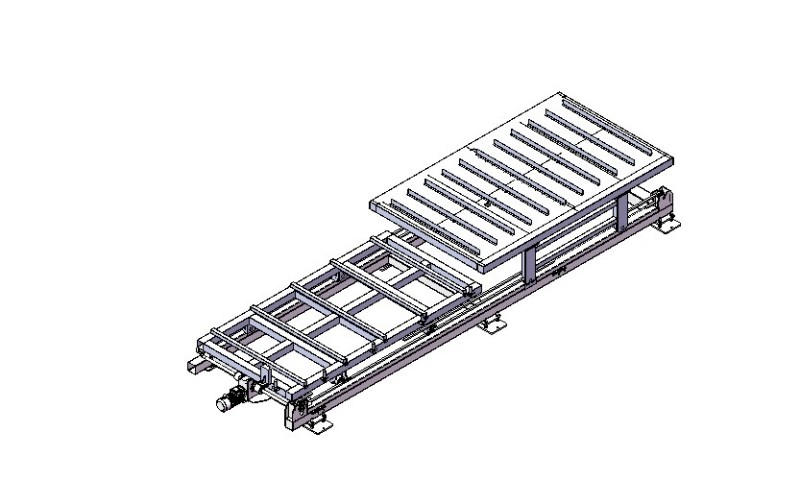
Önümiň görkezilmegi


Enjamlaryň tehniki parametrleri
| Plastinkanyň iň köp ýüklenmegi we düşürilmegi | 4000 * 2000 | mm |
| Plastinkanyň iň az ýüklenmegi we düşürilmegi | 1500 * 1000 | mm |
| Plastinanyň iň ýokary ýüklenmegi we düşürilmegi | 50 | mm |
| Plastinanyň iň az ýüklenmegi we düşürilmegi | 0.8 | mm |
| Plastinkanyň iň köp ýüklenmegi we düşürilmegi | 3000 | kg |
| Çalyşma material awtoulagynyň bir gatly ýük agramy | 6 | T |
| Çalyşma material awtoulagynyň bir gatly ýükleýiş beýikligi | 200 | mm |
| Mehaniki gol terjime tizligi | 10-30 | m / min |
| El götermegiň mehaniki tizligi | 5-10 | m / min |
| Elektrik material ulag çalşygynyň tizligi | 10 | m / min |
| Enjamlaryň güýji | 10 | Kw |
| Enjamlary howa kabul ediji turba | 12 | mm |
| Enjamlaryň howa çeşmesi | 0.6-0.7 | Mpa |
| Kuwwat talaplary | 3 fazaly 5 simli 380V |
|
Maşyn wideosy
Enjamlaryň esasy komponentleriniň konfigurasiýa sanawy
| Seriýa belgisi | Ady | Marka | Bellik |
| 1 | Çyzykly gollanma | Taýwan HIWIN ýa-da Japanaponiýa SMG |
|
| 2 | Çyzykly slaýd | Taýwan HIWIN ýa-da Japanaponiýa SMG |
|
| 3 | Duýgur ekran adam maşyn interfeýsi | Şanhaý Flexem |
|
| 4 | Wakuum gözegçiligi | Taýwan KITA ýa-da SNS |
|
| 5 | Terjime çyzykly gollanma | Taýwan HIWIN ýa-da Japanaponiýa SMG |
|
| 6 | Çyzykly slaýderi terjime ediň | Taýwan HIWIN ýa-da Japanaponiýa SMG |
|
| 7 | CNC gözegçilik ediji | Japanaponiýa OMRON |
|
| 8 | DC tok üpjünçiligi | Japanaponiýa OMRON |
|
| 9 | Röle | Japanaponiýa OMRON |
|
| 10 | Emiş käsesi | REZES |
|
| 11 | Pnewmatiki komponentler | Taýwan AIRTAC ýa-da SNS |
|
| 12 | Servo Motor | Raynen | Uly inersiýa görnüşi |
| 13 | Takyk reduktor | Şanhaý YINTONG ýa-da Hangzhou KAXIELI | 8 ark minut |
| 14 | Rulmanlar | C&U podşipnikleri | Bejerişsiz |
| 15 | Fotoelektrik datçikleri | CHIIB | CHIIB seriýasy |
| 16 | Döwüji | Schneider | Delixi |
4020 Robot goluny ýüklemek we düşürmek Ikitaraplaýyn gantry Tehniki çözgüt
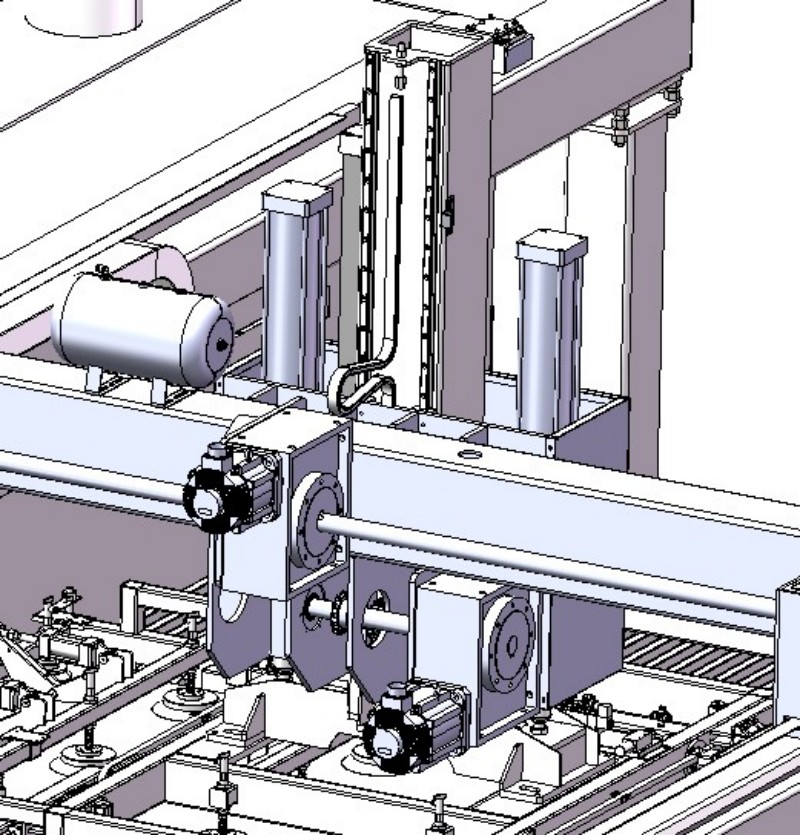
1.Mipulýator, umumy göteriji urgy 700mm we gapdal 4500mm (hakyky şertlere görä sazlanýar) takyk reduktor arkaly servo motor bilen dolandyrylýar.
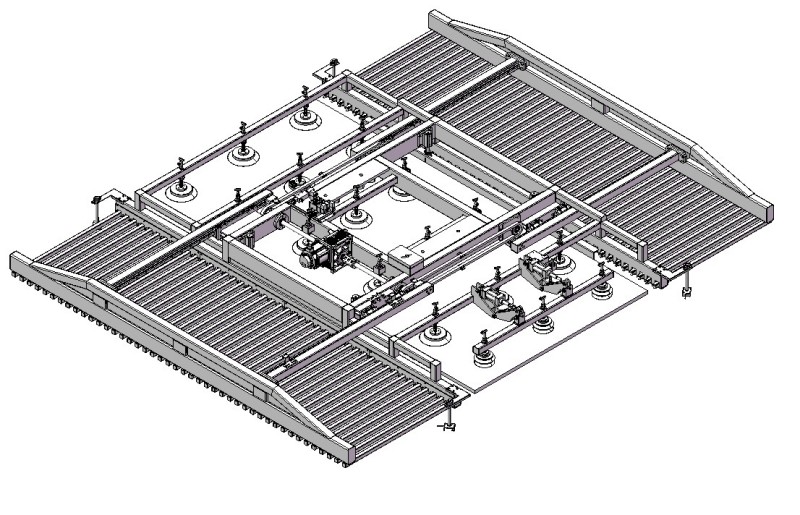
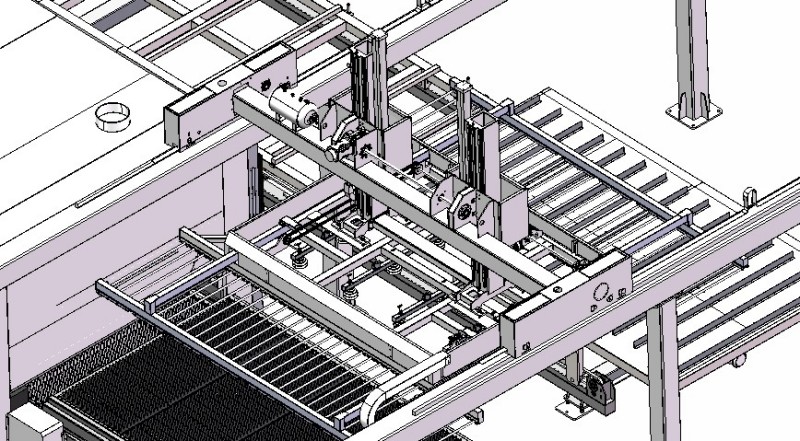
2. Wakuuma ýag çydamly sorujy käseleriň köp toplumy oturdyldy, sorujy käseleriň her toplumy el bilen ýapylyp, tabagyň ululygyna görä sazlanyp bilinýän el klapany bilen üpjün edildi. Iýmitlendiriji robotyň gaýtalanýan ýerleşiş takyklygy ± 2mm.
3.Ahyry, awtomatiki iýmitlenende plitalaryň bölünmegini aňsatlaşdyrmak üçin pnewmatik plastinka bölüji enjam bilen enjamlaşdyrylandyr. Bellik: Plastinalaryň arasyndaky dürli adsorbsion güýçleri we ýag düzümi sebäpli, tabaklaryň üstünlikli bölünip bilinjekdigi kepillendirilmeýär. El bilen kömek edilýän aýralyk hakyky şertlere görä amala aşyrylyp bilner.
4.Awtomatiki ýüklemek we düşürmek, lazer maşynynyň kesileninden soň taýýar material galyndy galyndylaryny saklamak üçin 1 goşa gatly elektrik material arabasy (ýokarky gatlak) we çig mal bilen üpjün etmek üçin lazer enjamy üçin 1 elektrik material arabasy (aşaky gatlak) bilen enjamlaşdyrylandyr.
5.Matiki ýük maşyny tizleşdiriji hereketlendiriji bilen hereket edýär we elektromagnit tormoz enjamy bilen enjamlaşdyrylýar. Hereketli magnit bölüji bilen enjamlaşdyrylan, kömekçi bölünmek üçin tagtany adsorbirlemek we bölünişiň üstünlik derejesini ýokarlandyrmak amatly.
6. Loadüklemek iki wilkaly düşüriş manipulýatoryny we şol bir göteriji sütüniň gurluşyna birikdirilen ýük sorujy käsäni kabul edýär. Ingüklemegiň usuly çep we sag goşa wilkaly gurluşdyr, düşüriş wilkasynyň gysga aralyk we pes şowsuzlyk derejesi bar.
7. Enjam doly servo bilen dolandyrylýar. Manipulýatoryň göterilmegi we gapdal hereketi ýokary güýçli sero hereketlendirijiler bilen hereket edýär. Göteriji mehaniki ulgam çalt işleýiş tizligi we ýokary ýerleşiş takyklygy bilen çyzykly gollanma relsleri bilen enjamlaşdyrylandyr.
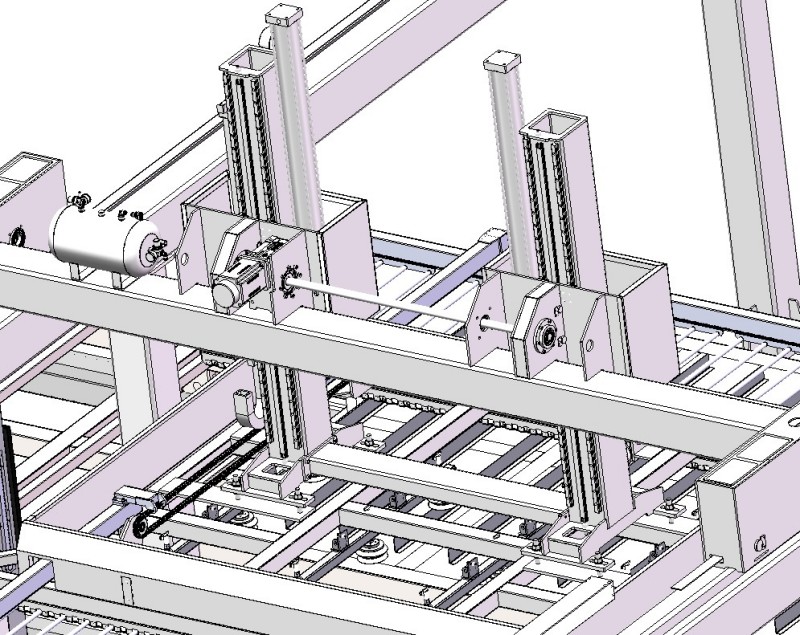
8. Dolandyryş ulgamy, Omron programma gözegçisiniň akylly CNC ulgamy bilen import edilen 10 dýuýmlyk duýgur ekrany ulanýar. Awtomatiki we el bilen işlemek usullary bar. Settingshli sazlamalar, gözegçilik we düzedişler çalt we aňsat ekranda el bilen dolandyrylyp bilner.
9. Bu enjamyň iş gurşawy -10-45 ℃ temperatura, otnositel çyglylyk 80% -den az, ýangyjy we partlaýjy materiallar, güýçli elektromagnit päsgelçiligi, poslaýjy gaz ýok, suwuk pürküji we içerde gowy yşyklandyryş talaplaryna laýyk gelmelidir.
Ulanyş giriş
1. Ulanyjy, dürli iş şertlerine laýyk duýgur ekrany işledip, awtomatiki ýüklemek tertibi bilen el bilen ýüklemek re betweeniminiň arasynda geçip biler.
2. adingükleme usuly: Açmak üçin aşaky bölek material çeňňegini ulanyň we içerki vakuum sorujy käse tabagy siňdirýär. Plasteri lazer platformasyna ýerleşdirmek üçin göteriji şah göterilýär we keseligine lazer maşynyna geçirilýär.
3.Materi düşürmek usuly elektrik çep we sag goşa wilka gurluşyny kabul edýär. Ingükleme wilkasynyň gysga aralyk we pes şowsuzlyk derejesi bar. Açylýan we ýapylýan wilka, uly ýük göterijilik ukybyna we güýçli deformasiýa garşy polat inedördül turba wilka dişlerini ulanýar. Material çeňňek bilen tabagyň arasyndaky baglanyşyk meýdany kiçijik we tabagy dyrmaýar. Jübüt çeňňek çyzykly ýol görkezijisi boýunça iki tarapa sinhron açylýar we ýapylýar we elektromagnit tormoz hereketlendirijisi bilen hereket edýär.
4. ipüklemek we düşürmek manipulýator korpusy marganes polat turbasyndan we ýokary hilli polatdan ýasalýar, olar tutuşlygyna kebşirlenýär, soňra titremäni ýeňilleşdirýär we uly CNC gantry degirmeni bilen işlenýär. Gowy berkligi we ýokary takyklygy bar. Gantry şöhlesi we aýaklary, gantry şöhlesiniň keseligine sazlamak üçin amatly boltlary sazlamak bilen birleşdirilýär. Adingüklemek we düşürmek manipulýatory takyk reduktor arkaly servo motor bilen dolandyrylýar we import edilýän çyzykly gollanma relsleri bilen enjamlaşdyrylýar. Göteriş mehanizmi ýokary tizlikli götermegiň durnuklylygyny ýokarlandyrmak we göteriş mehanizminiň hereketi wagtynda yrgyldy problemalarynyň öňüni almak üçin sinhron deňagramly silindr bilen enjamlaşdyrylandyr.
Effekt çyzgysy we ölçegli çyzgy




Enjamlary gurnamak üçin taýýarlyk elementleri
1. Enjamyňyza birikmek üçin 380V60A tok üpjünçiligini we 5 ýadroly 10 mm² elektrik kabelini taýýarlaň.
2. 0.6MPa iş basyşy bilen gysylan howa çeşmesi we enjamlara birikdirilen howa turbasy.
3. Enjamlaryň işleýän ýerinde howpsuzlyk duýduryş belliklerini we iş proseduralaryny düzüň.
Howpsuzlyk çäreleri
1.Operatorlara iş aralygyndaky ykjam enjamlaryň iş meýdanyna girmek gadagandyr ;
2. Iş meýdanyna girýän işgärler howpsuzlyk tälimini almaly ;
3. Roboty ulanmazdan ozal, iş şertleriniň ýerine ýetirilendigini tassyklamaly.
Hyzmat
--- Satuwdan öňki hyzmat:
Satuwdan öňki mugt maslahat beriş / Mugt nusga alma
REZES Lazer, satuwdan öň 12 sagat çalt jogap we mugt maslahat berýär, Islendik tehniki goldaw
ulanyjylar üçin elýeterlidir.
Mugt nusga ýasamak mümkin.
Mugt nusga synagy bar.
Distribhli paýlaýjylara we ulanyjylara öňe gidiş çözgüt dizaýnyny hödürleýäris.
--- Satuwdan soňky hyzmatlar:
Süýümli lazer kesýän maşyn üçin 1,3 ýyl kepillik
2. E-poçta, jaň we wideo arkaly doly tehniki goldaw
3. Ömürboýy tehniki hyzmat we ätiýaçlyk şaýlary bilen üpjün etmek.
4. Müşderileriň talap edişi ýaly gurallaryň mugt dizaýny.
5. Işgärler üçin mugt okuw gurnama we işlemek.
Sorag-jogap
1. S: Näme üçin sizi saýlamaly?
J: Bizi saýlasaňyz, ýokary hilli, iň gowy hyzmat, amatly baha we ygtybarly kepillik alarsyňyz.
2.Q: men maşyn bilen tanyş däl, nädip saýlamaly?
J: Diňe bize materiallary, galyňlygy we iş ululygyny aýdyň, laýyk enjamy maslahat bererin.
3. Enjamy nädip işletmeli?
J: Maşyn bilen iňlis gollanmasyny we wideosyny size gowşurarys. Eger-de size mundan beýläk kömek gerek bolsa, biziň bilen habarlaşmagyňyzy haýyş edýäris.
4.Q: Maşynyň hilini barlamak üçin nusga alyp bilerinmi?
J: Elbetde. Logotipiňizi ýa-da dizaýnyňyzy bize beriň, mugt nusgalar size hödürlenip bilner.
5.Q: Maşyn meniň talaplaryma görä düzülip bilnermi?
J: Elbetde, güýçli tehniki toparymyz bar we baý tejribämiz bar. Biziň maksadymyz sizi kanagatlandyrmak.
6.Q: Biziň üçin ibermegi tertipläp bilersiňizmi?
J: Elbetde. Müşderilerimize iberişini deňiz we howa arkaly tertipläp bileris. Söwda şertleri FOB, ClF, CFR bar.